Background:
In March 2011 there was an accident at the Fukushima Daiichi Nuclear Power Plant in Japan that caused multiple reactor meltdowns and radioactive contamination. While the disaster was unfolding there was the opportunity to open a release valve to vent hydrogen gas that may have prevented subsequent gas explosions [1]. Unfortunately no human workers could reach this area due to the level of radiation.
The situation was somewhat contained by the hard work and sacrifice of human workers, with some help from various robots. Many types of robots were used, including industrial inspection robots developed in Japan and military EOD robots developed in the United States. These remote-controlled machines were able to explore the radioactive areas and take photos, however the radiation causes the electronics to degrade and fail. With rad-hardening it’s possible to build robot systems that are more durable, but they still lack the agility and dexterity of a human worker.
This lack of robotics capability inspired DARPA (Defense Advanced Research Projects Agency) to launch a challenge to teams all over the world to build a teleoperated, semi-autonomous robot capable of performing critical tasks in hazardous industrial environments.
The challenge:
 |
 |

As the program progressed, DARPA modified the challenge requirements to suit the technology capability and some tasks in the finals event were easier than they had been previously.
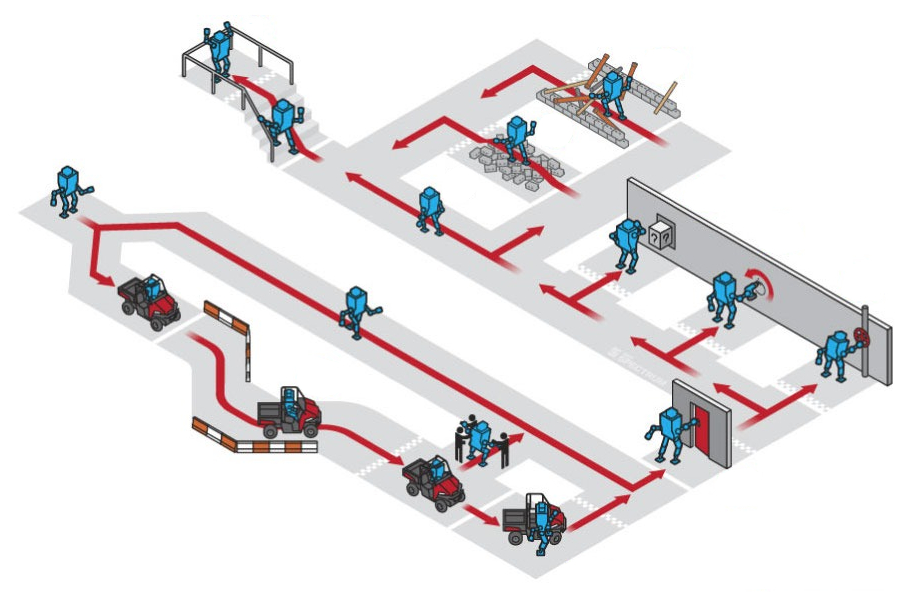
The final tasks were:
- Drive a vehicle, exit the vehicle
- Open door with lever handle
- Turn a hydraulic valve
- Use a tool to cut a hole in drywall
- Push an emergency button or pull a lever
- Walk over pile of rubble (cinder blocks)
- Clear a pile of debris (wood, pipes, hoses)
- Walk up steps

I was a member of the CMU (Carnegie Mellon University) Tartan Rescue team and our CHIMP (CMU Highly Intelligent Mobile Platform) robot came 3rd place in the finals, winning a prize of USD$500,000 [5].
To see the robot in action you can watch some videos at the bottom of this page.
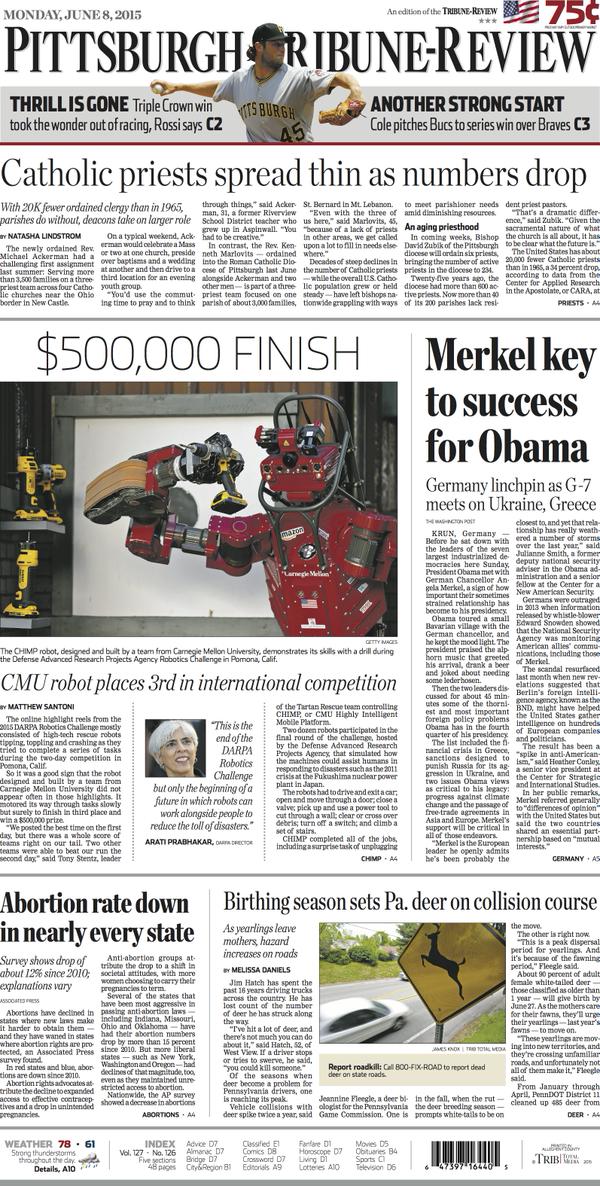
Our achievement received various press coverage including the Pittsburgh Post-Gazette, Tribune-Review (Fig. 6) and TribLIVE.com. The front-page photo shows CHIMP holding a yellow-colored drill with a tool for cutting through a wall. I was the operator guiding the robot to perform this particular task.
The event captured a lot of interest from the general public. One particularly exciting moment occurred after CHIMP fell over during our first run on day 1. When the robot fell the crowd gave a loud, collective “groan”. The crowd’s interest started to wane when they realized that this was the end for another broken robot. They didn’t know that CHIMP’s human operators were working on a plan from the Operator Control Room. The operator sent a command to make CHIMP roll back over. The robot twitched its leg. A young boy in the crowd suddenly lept onto his feat and pointed at CHIMP, yelling “he’s getting back up again!” and the crowd erupted with a cheer. Whilst many robots fell over during the competition, CHIMP was the only robot capable of getting back up again [9].
Research:
Specifically I worked on:
- System to grasp drill tool using force-feedback, motion planning to manipulate tool and cut hole in wall [more info]
- Perception and grasping of unmodeled objects e.g. pieces of wood, debris [more info]
- Computer vision to detect doors, autonomous door opening [more info]
- LiDAR-based valve detection, manipulation of valve handles and levers [more info]
- Autonomous navigation, dynamic obstacle avoidance [more info]
Videos:
On day 1 our robot completed the required tasks in 55 minutes and 15 seconds (videos 1-2).
You can watch the moment where CHIMP falls over and gets back up again in video 3.
At the end of day 1 we were in 2nd place. However on day 2 our robot failed to complete all the tasks (video 4)
and another team achieved a faster time, putting us in 3rd place.
 The robot completes all the tasks. Duration: 55 min. |
 Duration: 3 min. (20x speed) [9]. |
 |
|
The robot fails to complete the tasks. Duration: 1 hr 35 min. |
This work was conducted with members of the Tartan Rescue team at Carnegie Mellon University
and NREC (National Robotics Engineering Center).
For more information see the paper:
G. C. Haynes, D. Stager, A. Stentz, B. Zajac, D. Anderson, D. Bennington, J. Brindza, D. Butterworth, C. Dellin, M. George, J. Gonzalez-Mora, M. Jones, P. Kini, M. Laverne, N. Letwin, E. Perko, C. Pinkston, D. Rice, J. Scheifflee, K. Strabala, J. M. Vande Weghe, M. Waldbaum, R. Warner, E. Meyhofer, A. Kelly and H. Herman, “Developing a Robust Disaster Response Robot: CHIMP and the Robotics Challenge”, Journal of Field Robotics, Vol. 34, No. 2, March 2017.
| References: |
|
[1] A. Montoya, “Disaster response robots”, Swiss Re – Open Minds, February 2014
http://openminds.swissre.com/stories/578 |
|
[2] Concept drawings for DARPA Robotics Challenge, DARPA, April 2012
www.darpa.mil/program/darpa-robotics-challenge |
|
[3] E. Guizzo and E. Ackerman, “DARPA Robotics Challenge: Here Are the Official Details”, IEEE Spectrum, April 2012
http://spectrum.ieee.org/automaton/darpa-robotics-challenge-here-are-the-official-details |
|
[4] E. Ackerman, “DARPA’s Virtual Robotics Challenge: OSRF Gets Simulator Ready”, IEEE Spectrum, June 2013
http://spectrum.ieee.org/automaton/osrf-prepares-for-darpa-virtual-robotics-challenge |
|
[5] A. Keay, “DARPA Virtual Robotics Challenge results”, Robohub, June 2013
http://robohub.org/darpa-virtual-robotics-challenge-results |
|
[6] E. Ackerman, “DARPA Robotics Challenge Trials: Final Results”, IEEE Spectrum, December 2013
http://spectrum.ieee.org/automaton/darpa-robotics-challenge-trials-results |
|
[7] A. Hamacher, “DARPA’s Robotics Challenge: A pocket-sized guide to the finals”, Robohub, June 2015
http://robohub.org/darpas-robotics-challenge-a-pocket-sized-guide-to-the-finals |
|
[8] E. Ackerman and E. Guizzo, “DARPA Robotics Challenge: Amazing Moments, Lessons Learned, and What’s Next”, IEEE Spectrum, June 2015
http://spectrum.ieee.org/automaton/darpa-robotics-challenge-amazing-moments-lessons-learned-whats-next |
|
[9] E. Ackerman and E. Guizzo, “DRC Finals: CMU’s CHIMP Gets Up After Fall, Shows How Awesome Robots Can Be”, IEEE Spectrum, June 2015
http://spectrum.ieee.org/automaton/drc-finals-cmu-chimp-gets-up-after-fall-shows-how-awesome-robots-can-be |