HUBO Lab
This 6-DOF manipulator originally began as a project for a division of Samsung and was designed by Professor JunHo Oh from the HUBO Lab (Humanoid Robot Research Center) at KAIST (Korea Advanced Institute of Science & Technology).
After that project finished, the design morphed into what you see here, which is a light-weight arm having upper-arm and lower-arm links of similar length.
The body is CNC machined aluminium with Maxon motors and Harmonic Drive reducers.
The robot is controlled by a Windows-based program that runs on Windows XP with RTX.
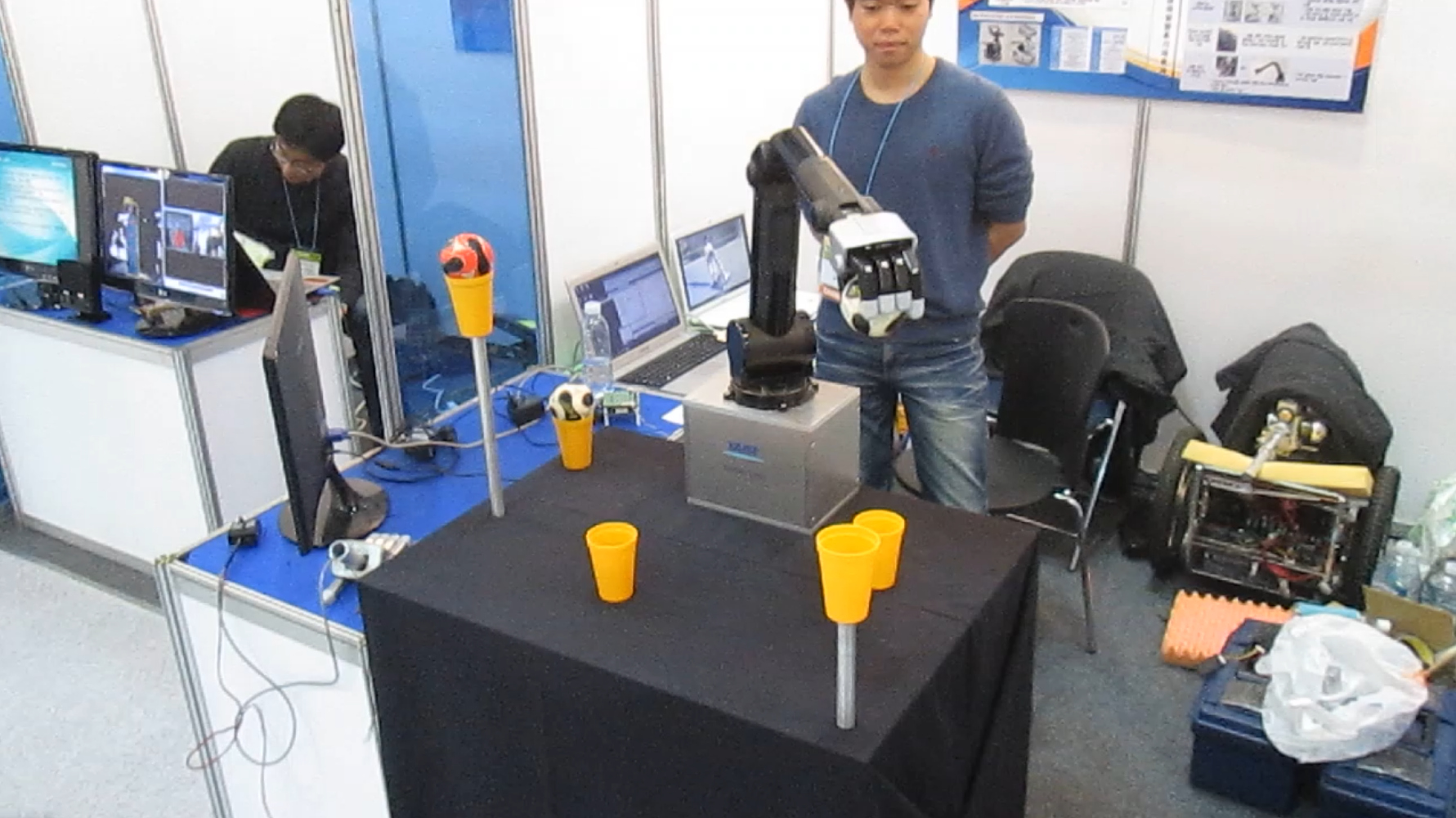
One student used this manipulator to create a vision-guided ball-hitting robot and another student created the pick-and-place demo shown in the video below.
I actually worked at the Hubo Lab for one year where I developed a Linux-based real-time control system and a ROS (Robot Operating System) interface for motion planning. I tested that software with Hubo Arm and other robots developed in the lab.
|
Fig. 1: |
Fig. 2: |
Video 1: |


Korea University
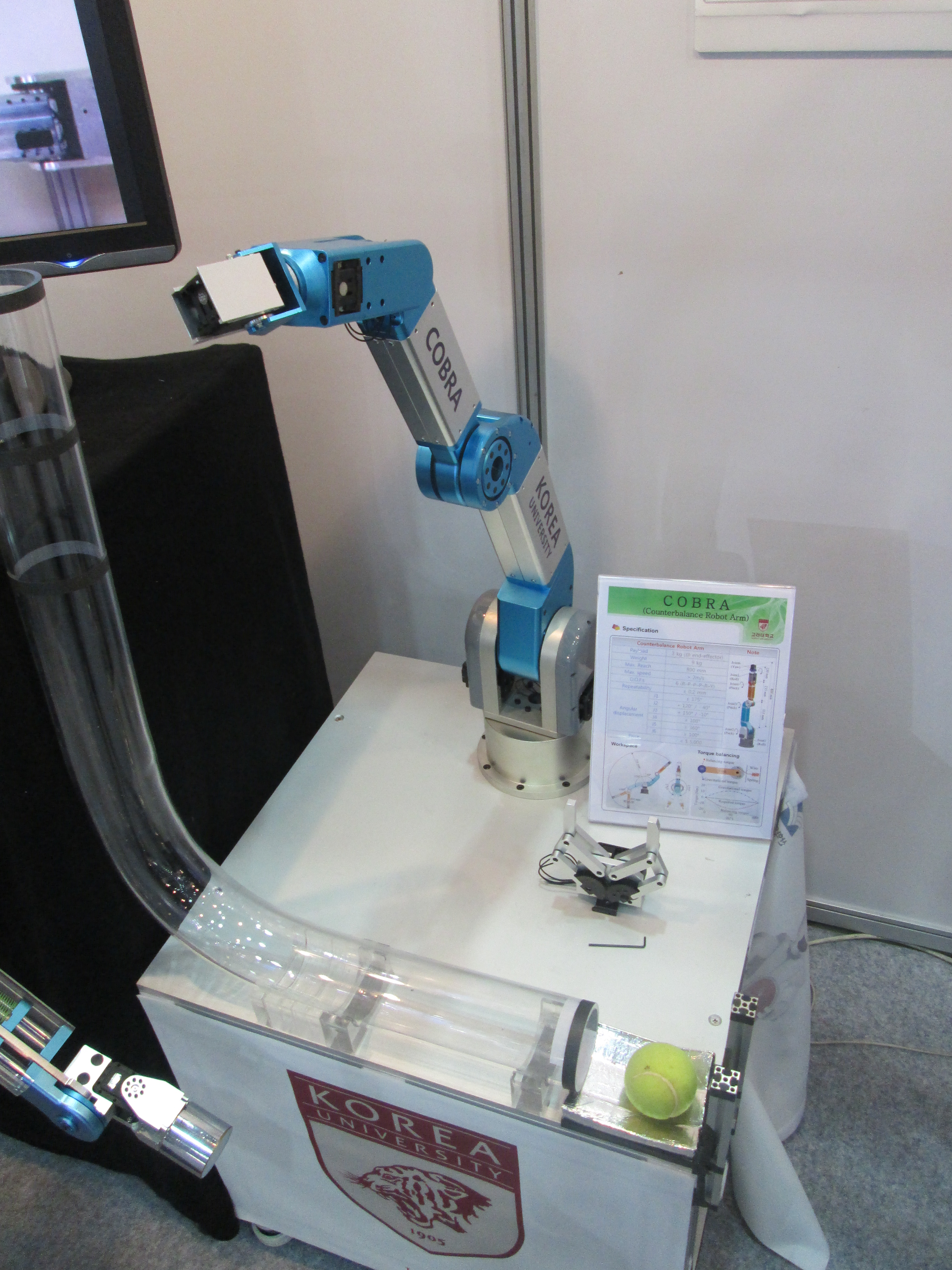
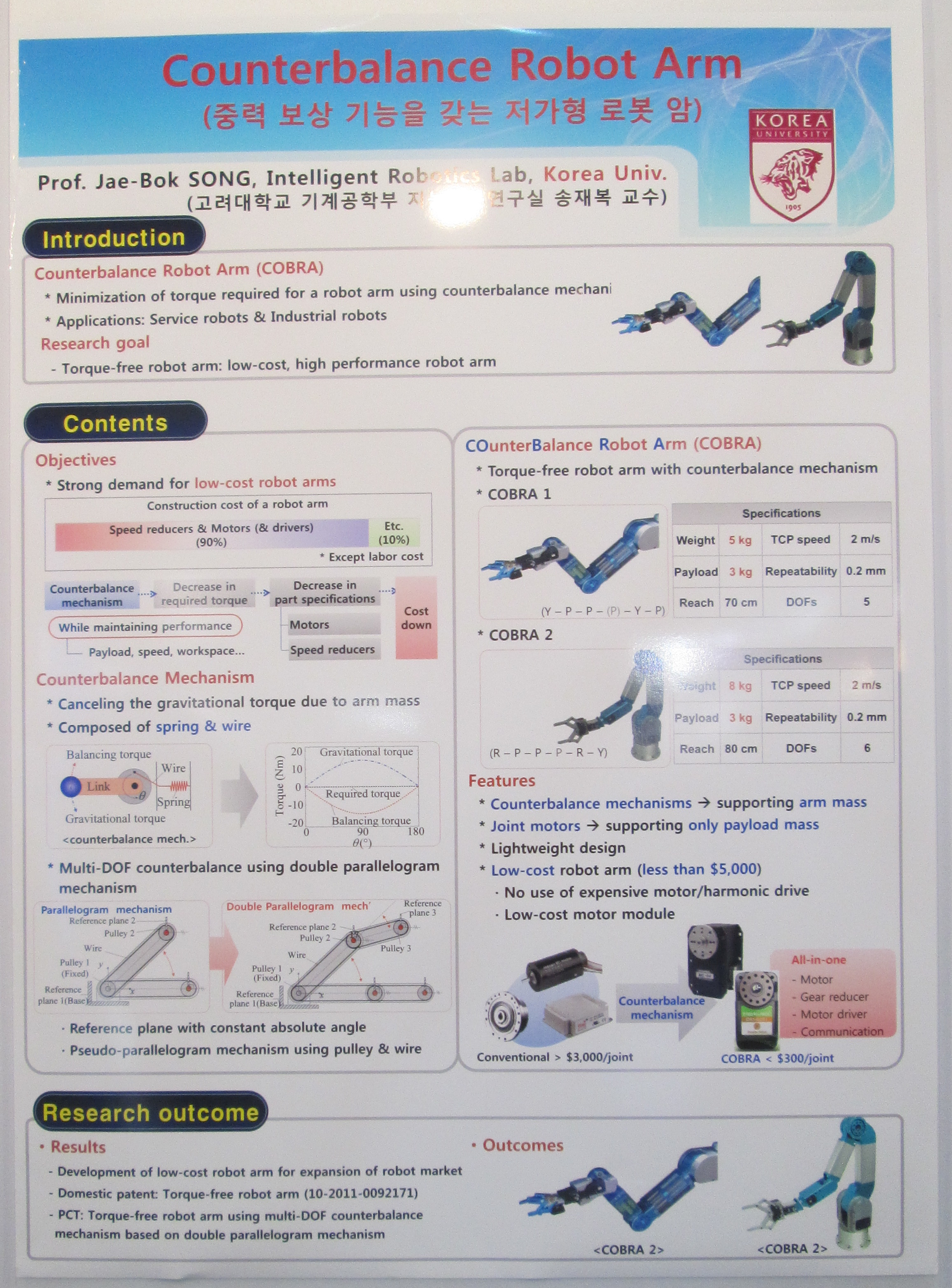
The IRL (Intelligent Robotics Laboratory) were demonstrating their COBRA (Counterbalance Robot Arm).
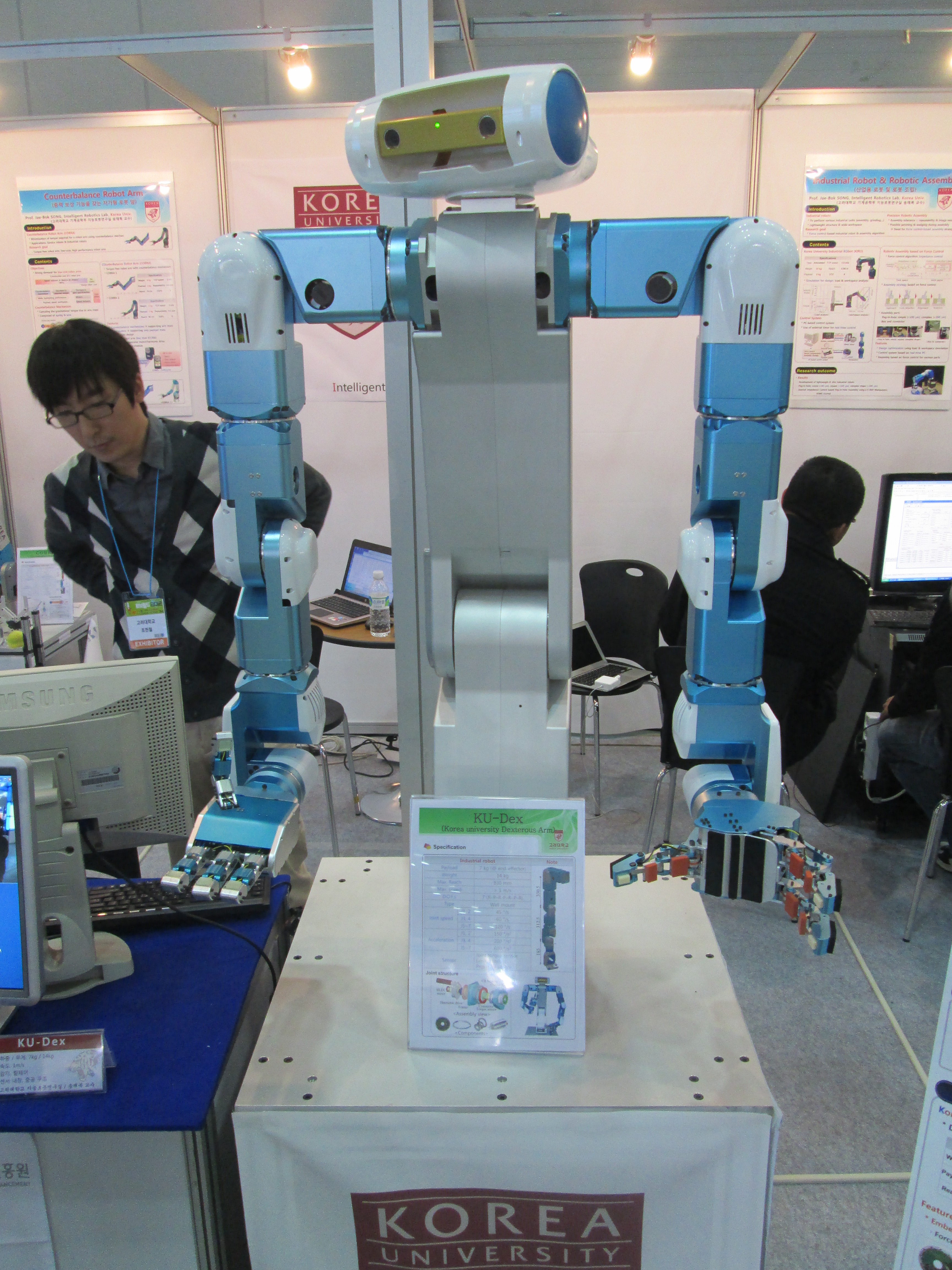
They also had a dual-arm robot with a Bumblebee stereo camera, that utilizes their KU-Dex (Korea University Dexterous Arm).
Website: www.korea.ac.kr/Intelligent Robotics Laboratory/
|
Fig. 3: |
Fig. 4: |
Fig. 5: |
|
Fig. 3: |
Fig. 4: |
|


Unknown lab
This group was showing their human-safe robot arm which tries to keep a
safe distance from people using a Kinect sensor.
|
Video 2: |

KIMM (Korea Institute of Machinery and Materials)
They were advertising the newly-designed AMIRO dual arm manipulator.
Website: www.kimm.re.kr/pr_kimm_news/id/751 (in Korean) (English translation)
|
Video 3: |
| Update: This video from news network YTN shows the real robot in action. Video 4:  |

Hyundai
They were demonstrating their industrial robot arms.
|
Video 5: |
