KETI (Korea Electronics Technology Institute)
They have developed an actuator for robot joints that consists of JTS (Torque Sensor),
Harmonic Drive reducer, motor, brake and controller (see Fig. 1).
They are also working on a multi-channel instrument for surgery (Fig. 2). The micro-motors
at one end control cables that actuate the mechanism at the tip of the instrument.
|
Fig. 1: |
Fig. 2: |


SKKU (SungKyunKwan University)
They have developed an elastomer-based linear actuator.
Website: shb.skku.edu/irms/research/
|
Fig. 3: |

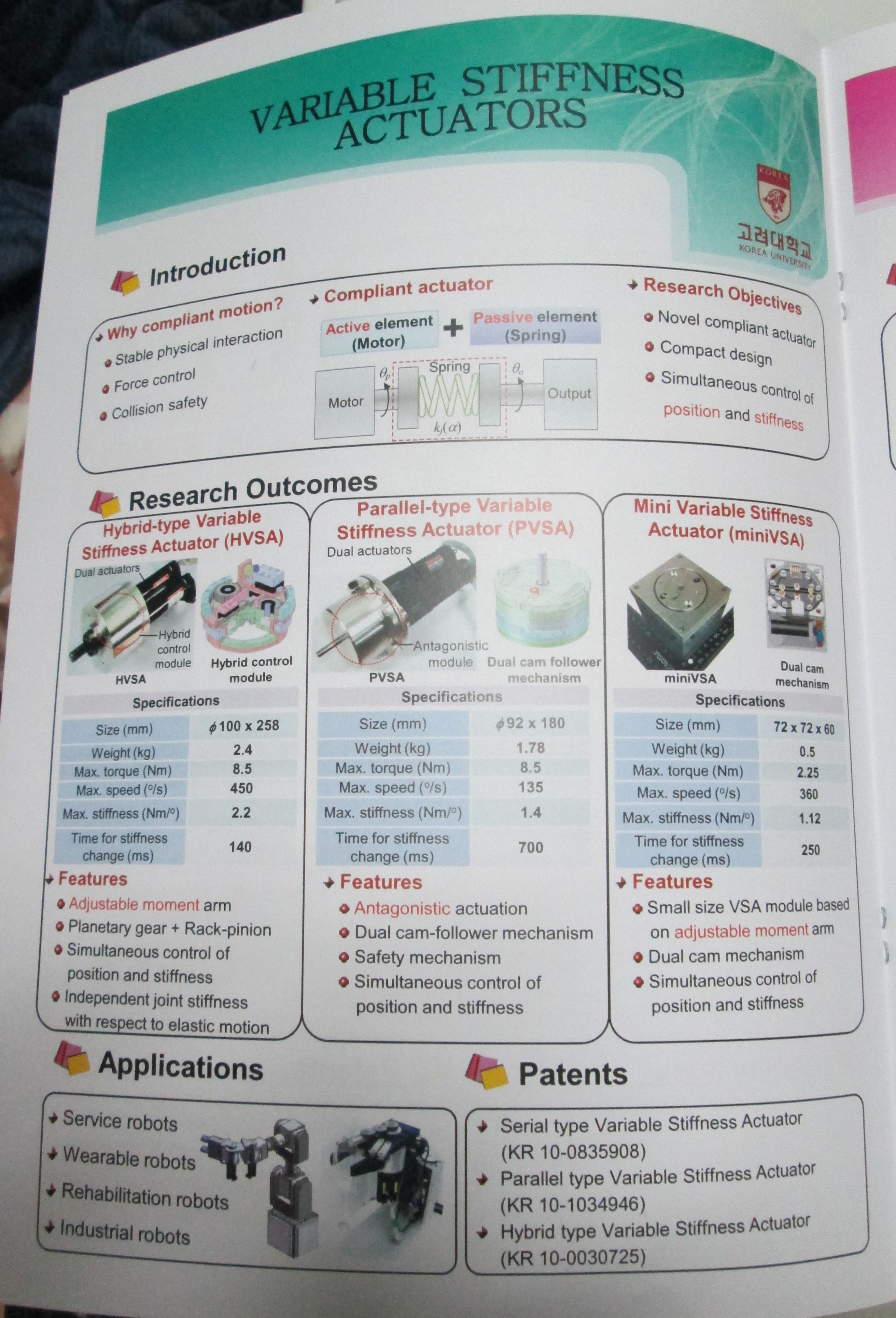
Korea University
The IRL (Intelligent Robotics Laboratory) is working on JTS (Joint Torque Sensor),
VSA (Variable Stiffness Actuator) and Safe Joint Modules and Mechanisms.
Website: korea.ac.kr/intelligent-robot-laboratory/research/
|
Fig. 4: |
Fig. 5: |