I attended the ICRA conference that was held in St Paul, one of the “twin cities” of Minnesota.
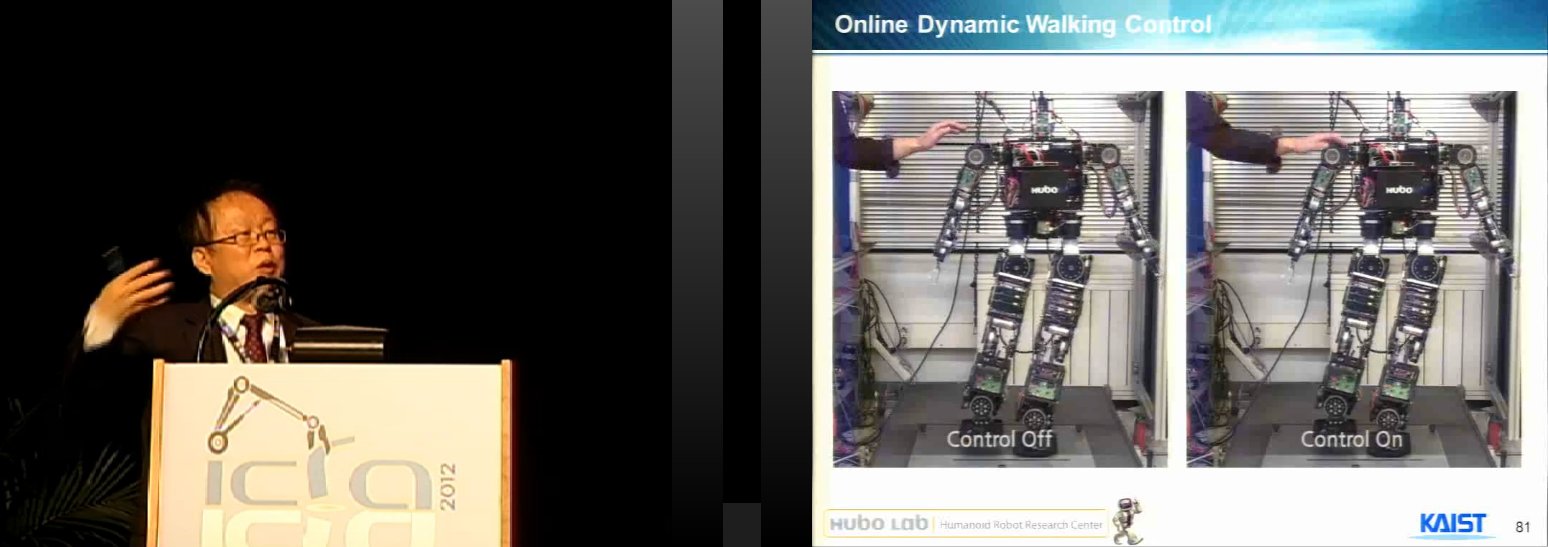
My Professor Jun-ho Oh from KAIST delivered the plenary talk “Development Outline of the Humanoid Robot: HUBO II”, see Fig. 1 below.
You can view the slides here: (114 pages)
http://techtalks.tv/development-outline-of-the-humanoid-robot-hubo-ii/slideshow/
Or watch the full presentation:
http://techtalks.tv/development-outline-of-the-humanoid-robot-hubo-ii/
Update: Unfortunately it looks like videos on TechTalks.tv are broken.
You can see 3 video clips from the presentation below (Video 1 to 3), courtesy of Plastic Pals:
www.plasticpals.com/?p=32425
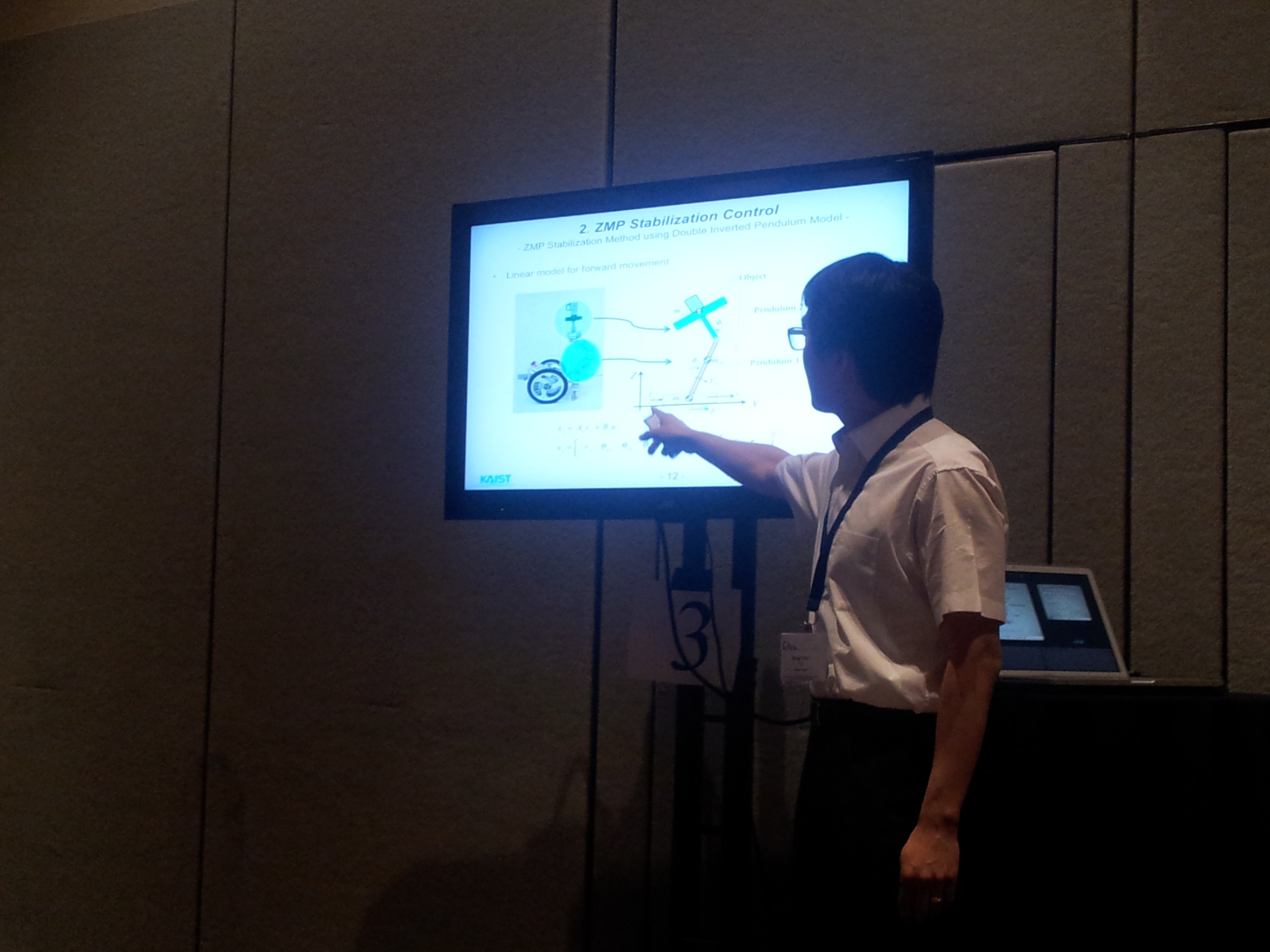
Also my lab-mate Dongil (Fig. 2) presented his paper:
D. Choi and J. Oh, “ZMP stabilization of Rapid Mobile Manipulator”, ICRA 2012 PDF
|
Fig. 1: |
Fig. 2: |
|
|
Video 1:
Hubo 2 robot hand grip test and battery stress test, narrated by Prof Oh.  Plastic Pals |
Video 2:
Hubo 2 robot push-ups, bending, stretched-leg walking and whole-body motion control, narrated by Prof Oh.  Plastic Pals |
Video 3: Prof Oh discusses other projects in the lab, like HuboQ.  Plastic Pals |
The ICRA 2012 Mobile Manipulation Challenge (AKA Sushi Boat Challenge or Yesterday’s Sushi Challenge) was held during the conference, for which teams had to program a PR2 robot to act like a restaurant waiter and make it perform tasks like setting or clearing a table. Video 4 below shows the PR2 robot “Jake” clearing a plate and bowl from the table. I forget which team this was but the robot was on loan from Willow Garage.
More info
www.icra2012.org/program/robotchallenge.php
http://mobilemanipulationchallenge.org
|
Fig. 3: |
Video 4: |


There were some other robots on display in the exhibit hall, including the new Robonaut 2 dual-arm robot developed by NASA’s Johnson Space Center and General Motors (Fig. 4).
Fig. 5 shows Robonaut’s hand, which is actuated by tendons (wire cables) that are fed through tubes to linear actuators. The actuating mechanism takes up more space than the fingers and is enclosed within the forearm.
|
Fig. 4: |
Fig. 5: |

