Self-driving cars and autonomous vehicles was one of the most popular topics at CES this year, with a huge number of groups in attendance.
Aptiv / Delphi
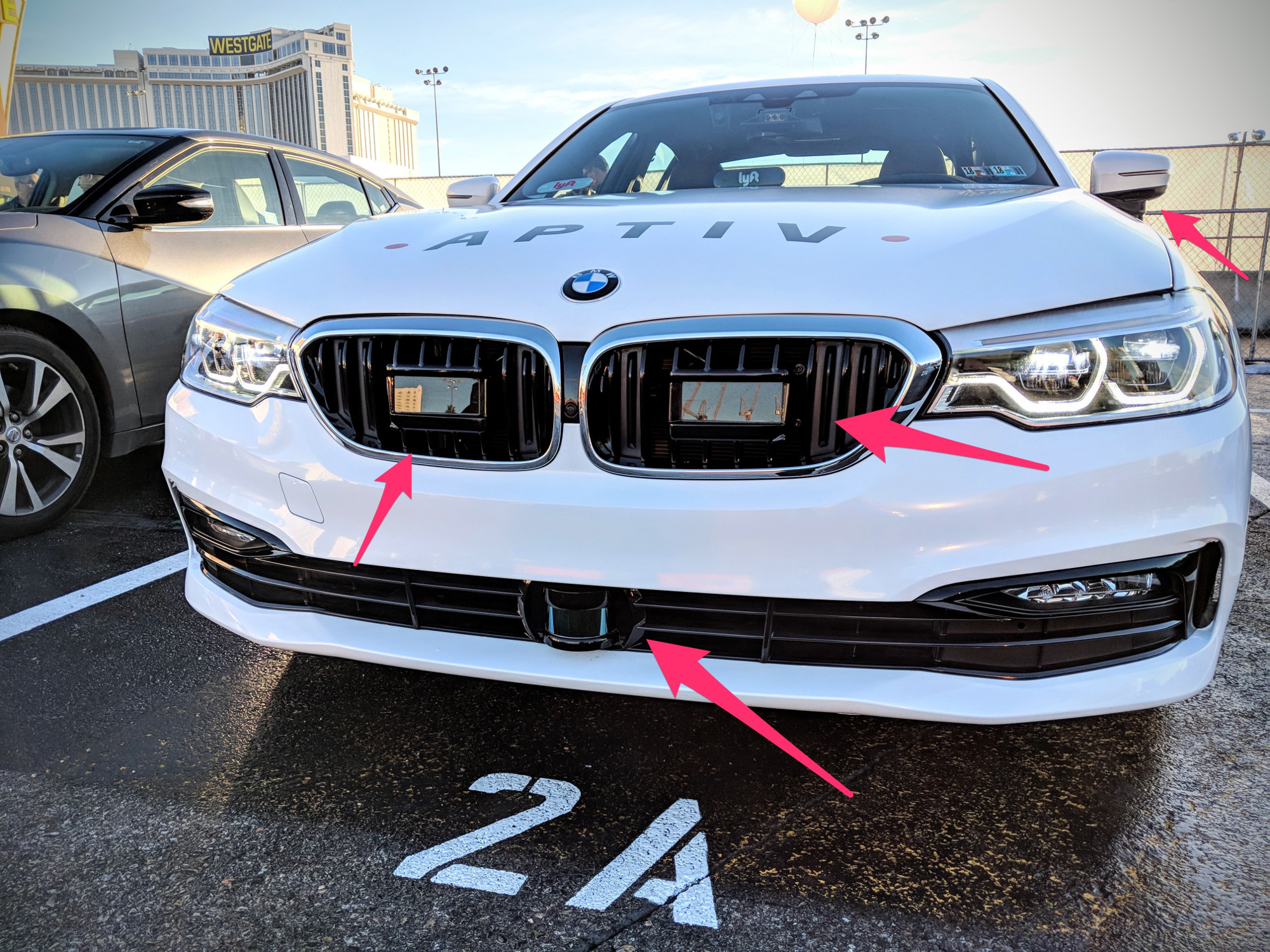
They had 8 autonomous vehicles at CES and were giving ride-sharing demos in collaboration with Lyft.
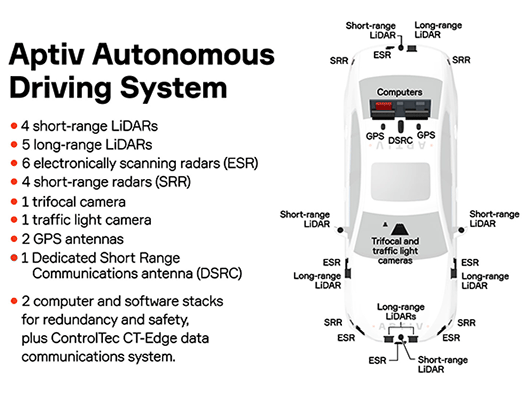
Their vehicle is a BMW sedan, with 9 x LiDAR sensors and 10 x Radar sensors (Fig. 6).
Website: www.aptiv.com/ces-2018
|
Fig. 1:
|
Fig. 2:
|
Fig. 3:
|
|
Fig. 4:
Front sensors |
Fig. 5:
Rear sensors |
Fig. 6:
Top view |




Navya Technologies SAS / Keolis Commuter Services
They were demonstrating their “Autonom Cab” which is a 6 seat autonomous taxi with no steering wheel, pedals or safety driver. They have also been conducting tests of their “Autonom Shuttle”, which is a 15 seat bus. The vehicles can be operated remotely by a web-based fleet management system.
The Autonom Cab has lots of sensors:
• 10 LiDARS (3 x 360° Velodyne VLP-16, 7 x 145° Valeo Scala)
• 6 Cameras
• 4 Radars
Website: www.navya.tech/en
|
Fig. 7:
|
Fig. 8:
Sensors on front of roof |
Fig. 9:
Rear sensors |



Roadstar.ai
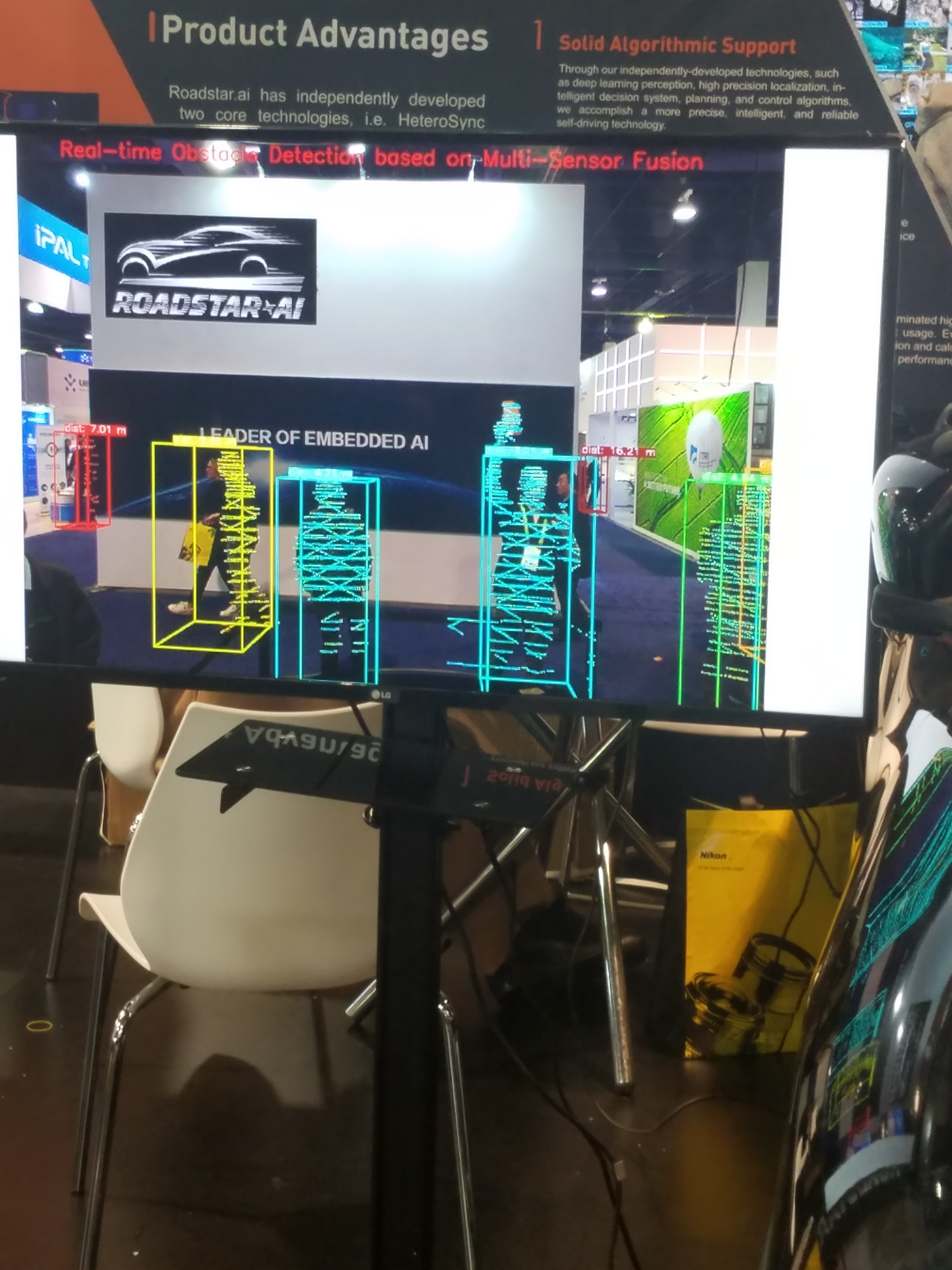
This group is developing software for L4 autonomous driving. At their booth they had a Nissan SUV with a screen showing the output of their perception system, which was detecting and tracking humans (Fig. 15).
The vehicle has various sensors:
• 1 x Hesai 40-channel LiDAR (“PANDAR 40”)
• 2 x Robosense 16-channel LiDARS (“RS-LiDAR-16”)
• 2 x Velodyne 16-channel LiDARS (model unknown)
• 5 cameras (1 x forward-facing with some sort of wide-angle lens, 2 x forward-facing with lens caps attached, 2 x side-facing, 1 x rear-facing)
Website: www.roadstar.ai
|
Fig. 10: |
Fig. 11: |
|
|
Fig. 12: |
Fig. 13: |
Fig. 14: |
|
Fig. 15: |
Video 1:
Sensor fusion demo  Roadstar.ai |
Video 2:
Panoramic sensor fusion  Roadstar.ai |





Torc Robotics
They were demonstrating their autonomous Lexus SUV which is called “Asimov”.
It has one Velodyne HDL-64 LiDAR mounted high above the roof, so there is minimal blind spots close to the vehicle.
It has at least 6 cameras arranged to provide 360° vision and it looks like they’re using deep learning in their perception software.
Website: www.torc.ai
|
Fig. 16:
 Torc |
Fig. 17:
 Torc |
TRI (Toyota Research Institute)
They were showing their v3 vehicle for automated driving research.
It has a lot of sensors:
• 4 x Luminar LiDAR on the roof
• 4 x Velodyne VLP-16 around the lower body
• 10 x Radar, including custom sensors in the front fender (quarter panel), see Fig. 23.
• 9+ cameras, large-body Prosilica GT (4 x forward-facing, 2 x forward at 45°, 2 x side-facing, 1 x rear-facing)
Website: pressroom.toyota.com/CES
|
Fig. 18: |
Fig. 19: |
Fig. 20: |
|
Fig. 21: |
Fig. 22: |
Fig. 23:
Location of Radar and LiDAR sensors.  Toyota |
|
Fig. 24: |
Fig. 25:
Close-up of custom triple-head Radar sensor in the front fender.  Toyota |
Fig. 25:
Installing the camera pod on the roof.  Toyota |






Elektrobit
This company is developing software for automated vehicles.
They had a fun demo at their booth, with some mini autonomous cars driving around a model of a city.
Each car had ultrasonic sensors around the bumper, a webcam and a depth sensor.
Website: www.elektrobit.com
|
Fig. 26: |
Fig. 27: |
Video 3: |


